

|
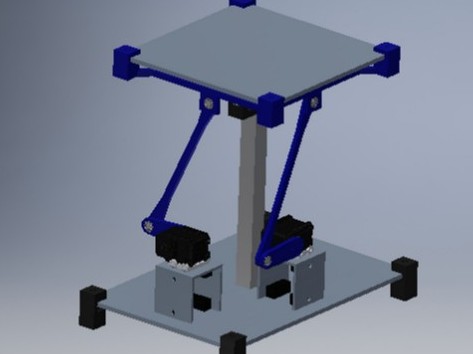
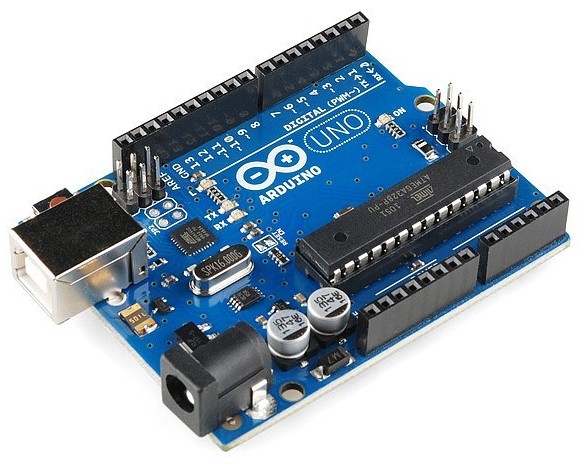
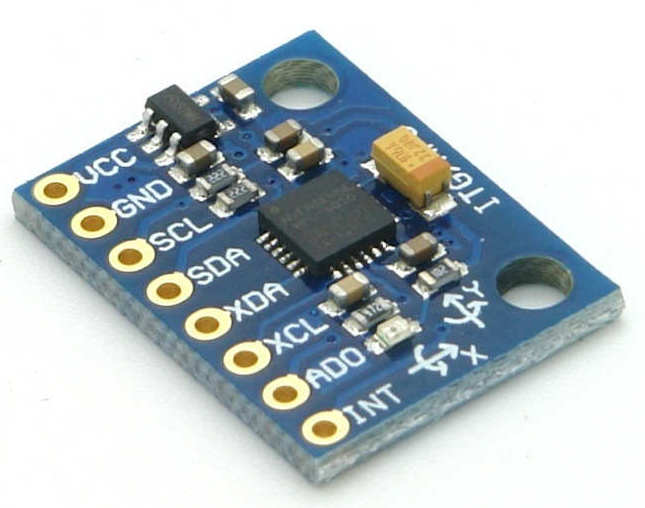
This page demonstrates a simple student project of Self Balancing Platform. The prototype is developed using Arduino Uno as microcontroller, MPU6050 as IMD (Inertial Measuring Devices) and AX-12 servo motors as actuators. Complete 3D model was done in Autodesk Inventor. System is power via Li-Po 4S (5000 mAh) and LM2596 DC-DC step down voltage converter (2 converter are used one for powering sensors and Arduino and second for powering the motors). Platform is suspended on 2020 extrusion profile via 3D printed support plate and cardan joint. Actuation of the platform is achieved via AX-12 servo motors and 3D printed levers. For cardan joint and acuating levers MR1262Z (6x12x4 mm) ball bearings are used.



PROJECT FILES&DOCS:
- 3D model: model
- Arduino sketch: source
- Demo video on youtube: video
IMAGE GALLERY:














VIDEO GALLERY :
- Details
- Category: Project Base
- Last Updated: 13 December 2020
- Hits: 9553