

|

Soft robotics is area in robotics in which robots, more specifically robotic actuators, are modeled based on how living organisms move and adapt to their surroundings. Rather than using rigid actuators and materials for robot design, using soft actuators provides an additional level of flexibility and adaptability of robotic manipulators. Soft robotic actuators are typically pneumatic actuators which perform movement or contraction when air within actuators is compressed. Excellent tutorials, resources and demonstrations in the area of soft robotics can be found at Soft Robotic Toolkit, a site built from research conducted at Harvard University and Trinity College Dublin.
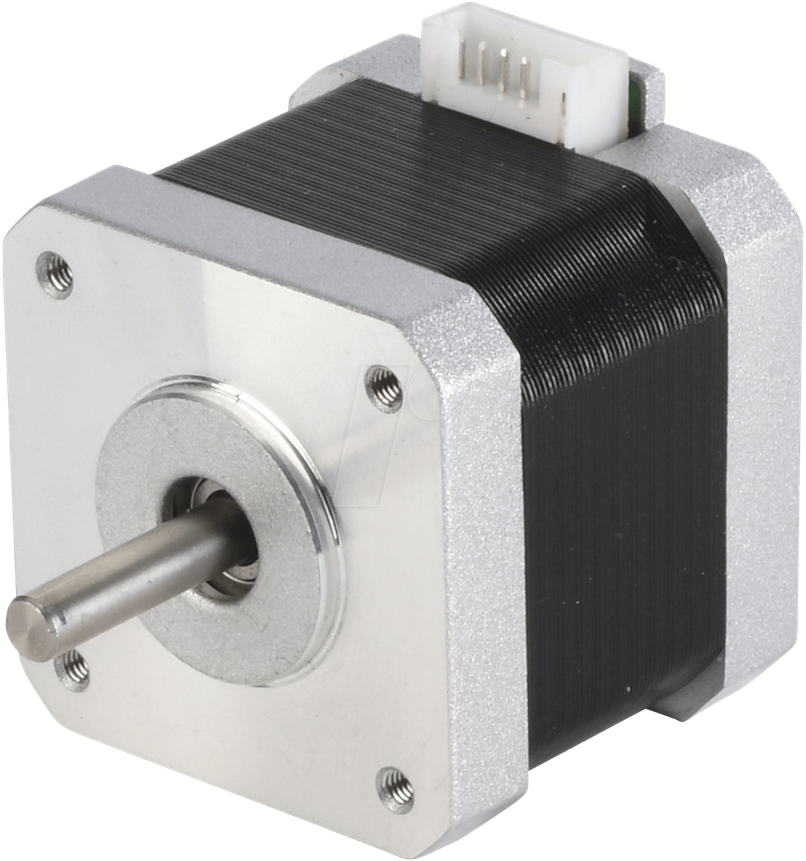
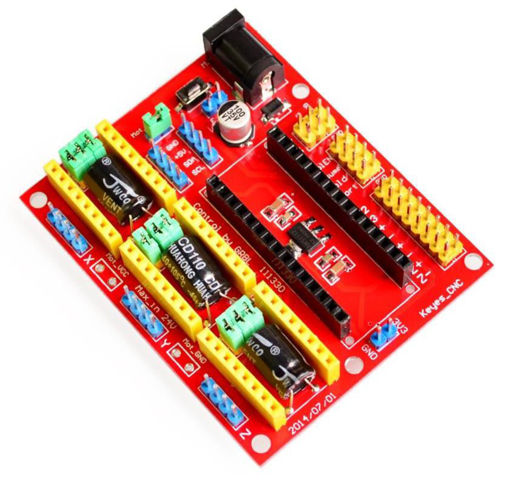
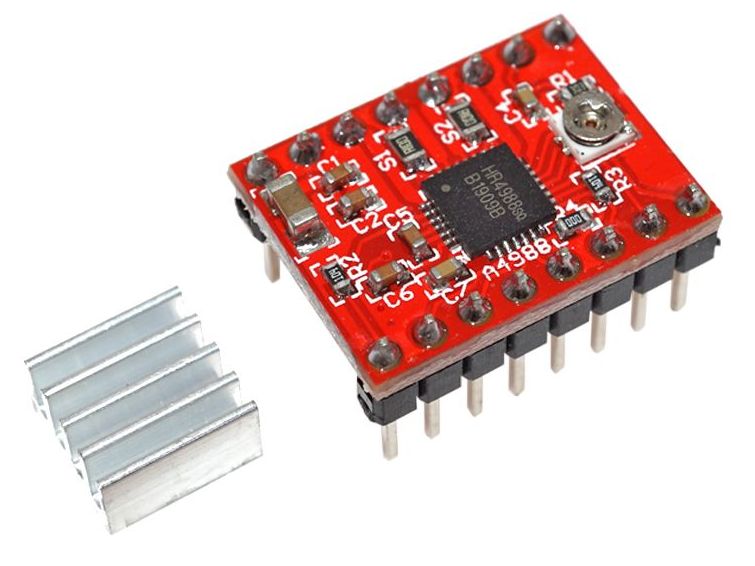
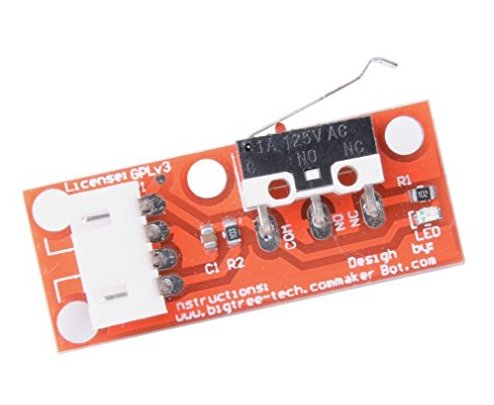
In this project a simple, three fingers, soft robotic gripper is presented. Gripper is pneumatic actuator built using silicone rubber EcoFlex 00-30 and 3D printed silicone mold. Mold is design as parametric OpenSCAD model so that one can experiment with different design parameters such as gripper thickness, number of gripper fingers, number and size of air channels and so on. In image gallery below gripper fabrication steps are presented. An improvised air compressor is built based on syringe pump from Dr. D-Flo (it is also OpenSCAD design). Small changes are made to original pump design and homing switch is added (below *.stl files are attached). Syringe pump consists of 50 ml syringe, Nema 17 stepper motor, arduino nano, CNC shield for arudino nano, A4988 stepper motor driver, dual axis resistive joystick and homing switch. This improvised air compressor is rather slow, but can be very usefull for testing and experimenting.



PROJECT FILES&DOCS:
- Gripper mold 3D model on thingiverse: model
- Syringe pump driver firmware: source
- Syringe pump printable parts (stl): parts-stl
- Demo video on youtube: video
IMAGE GALLERY:





















VIDEO GALLERY :
- Details
- Category: Project Base
- Last Updated: 28 May 2020
- Hits: 13605