

|

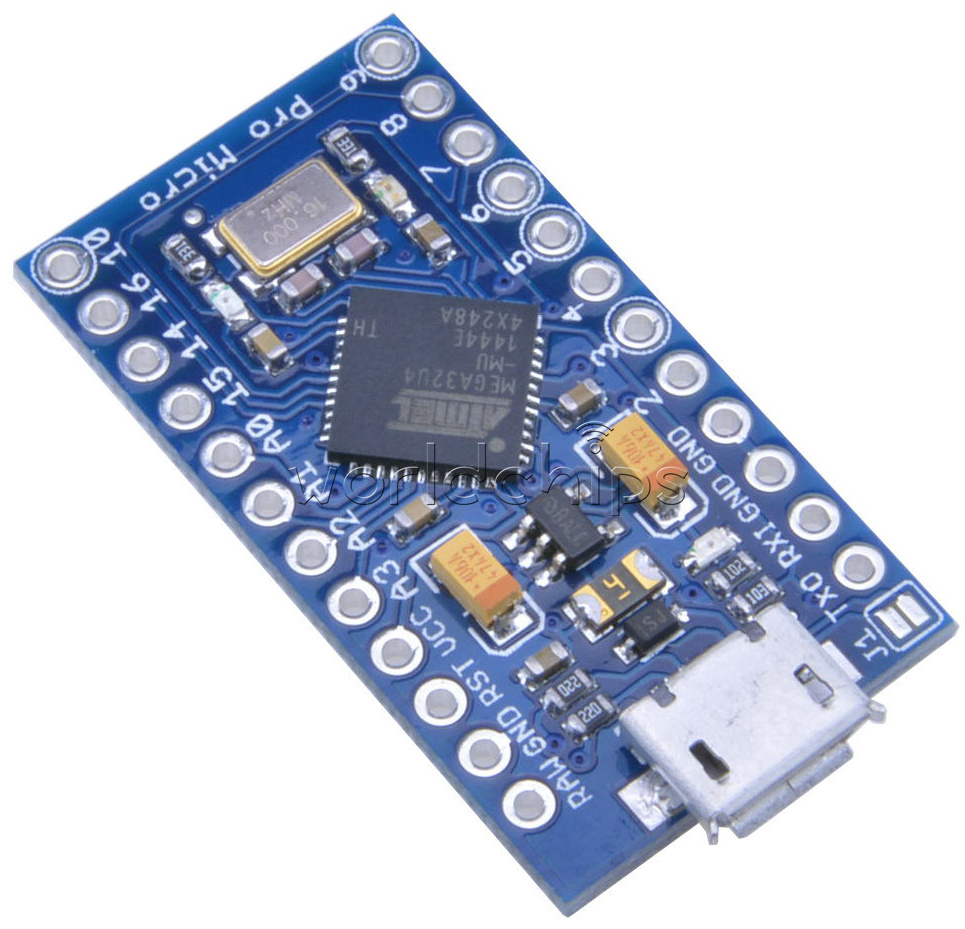
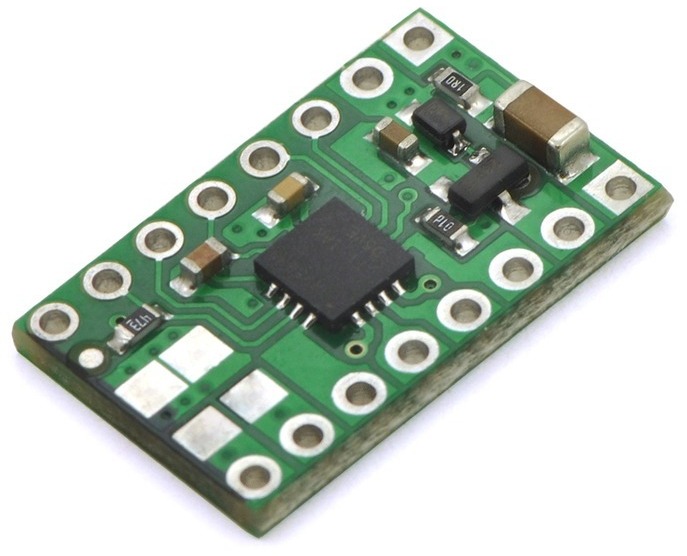
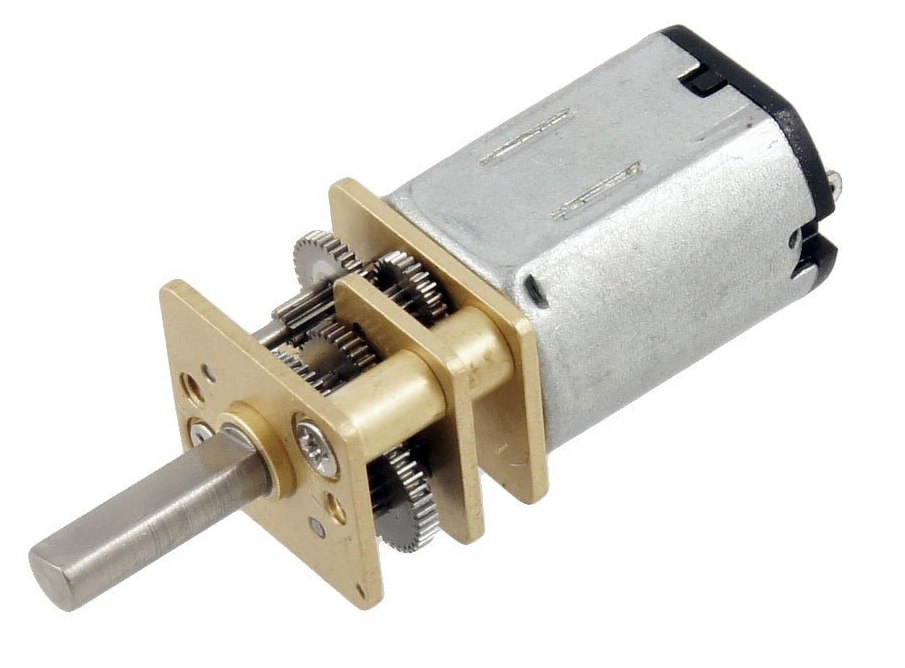
This project presents the line follower robot called The Bug built by our team Resistor 2K20 for RoboTEC 2020 student competition. However, due to outbreak of corona virus pandemic, competition is posponed. Implementation is similar to our previous robot, except in this version it is experimented with two pairs of wheels drive. Robot design is based on SparkFun ProMicro microcontroller board, Poloulu DRV8833 dual motor driver and ITR8307 optical reflection sensor. Robot chassis and wheels are made using 3D printer, while robot is power using Poloulu Micro Metal Gearmotors and Li-Po 2S battery. HC-05 bluetooth module is used for robot control and tunning.


Design is made flexible and can be implement with single motor pair drive or dual motor pair drive (check project files and docs). Robot chassis is parametric OpenSCAD design and can be adjusted accordingly. Furthermore, line following sensors and mounts can be excluded from design, so that robot can be customized for other purpose (some design examples are included in image gallery and model posted on thingivers)
PROJECT FILES&DOCS:
- Project schematic and pcb: single motor pair driver, dual motor pair driver, sensors
- Robot model on thingiverse: model
- Demo video on youtube: demo
- More videos from RoboTEC: videos
- Test firmware (arduino sketch): source
- Bluetooth app for robot control on google play store : HC-05 Bluetooth Remote
IMAGE GALLERY:




























VIDEO GALLERY:
- Details
- Category: Project Base
- Last Updated: 28 May 2020
- Hits: 6126